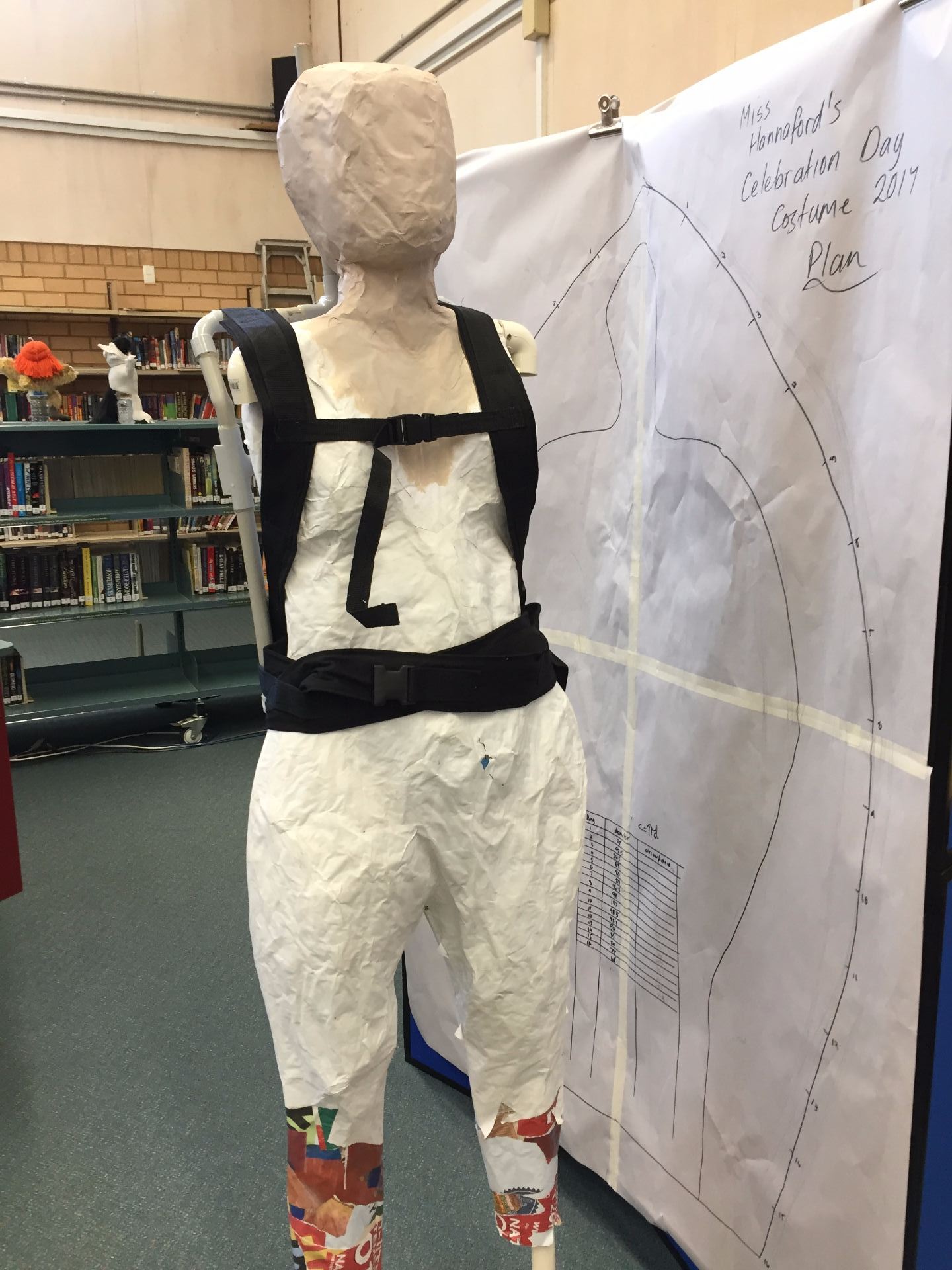
Making the backpack to support the puppet.
While watching Jim Henson’s Creature Shop Challenge, I saw how the contestants used backpack frames to support the creatures/ puppets they made. Most of the time, they used Alice pack frames to which they bolted aluminium flat bar or pvc. Alice pack frames are available on Amazon to buy, but they do not ship to Australia.
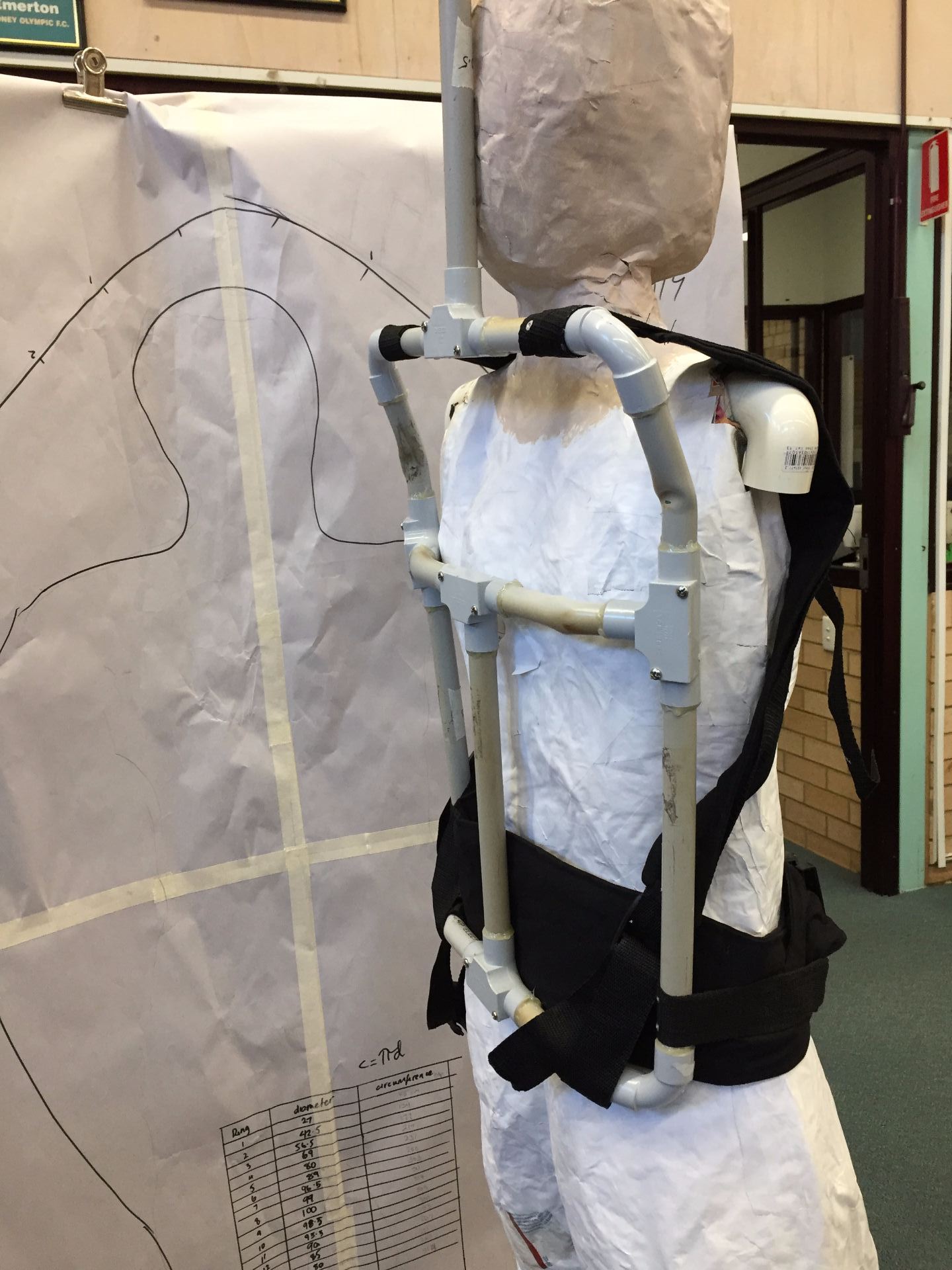
After watching various youtube clips on how to make a backpack frame, I decided to use PVC electrical conduit. When the Library computer area was renovated in 2014, I claimed all of the old electrical conduit so that I could use it for building puppet skeletons, so I have lots of conduit for making the backpack.
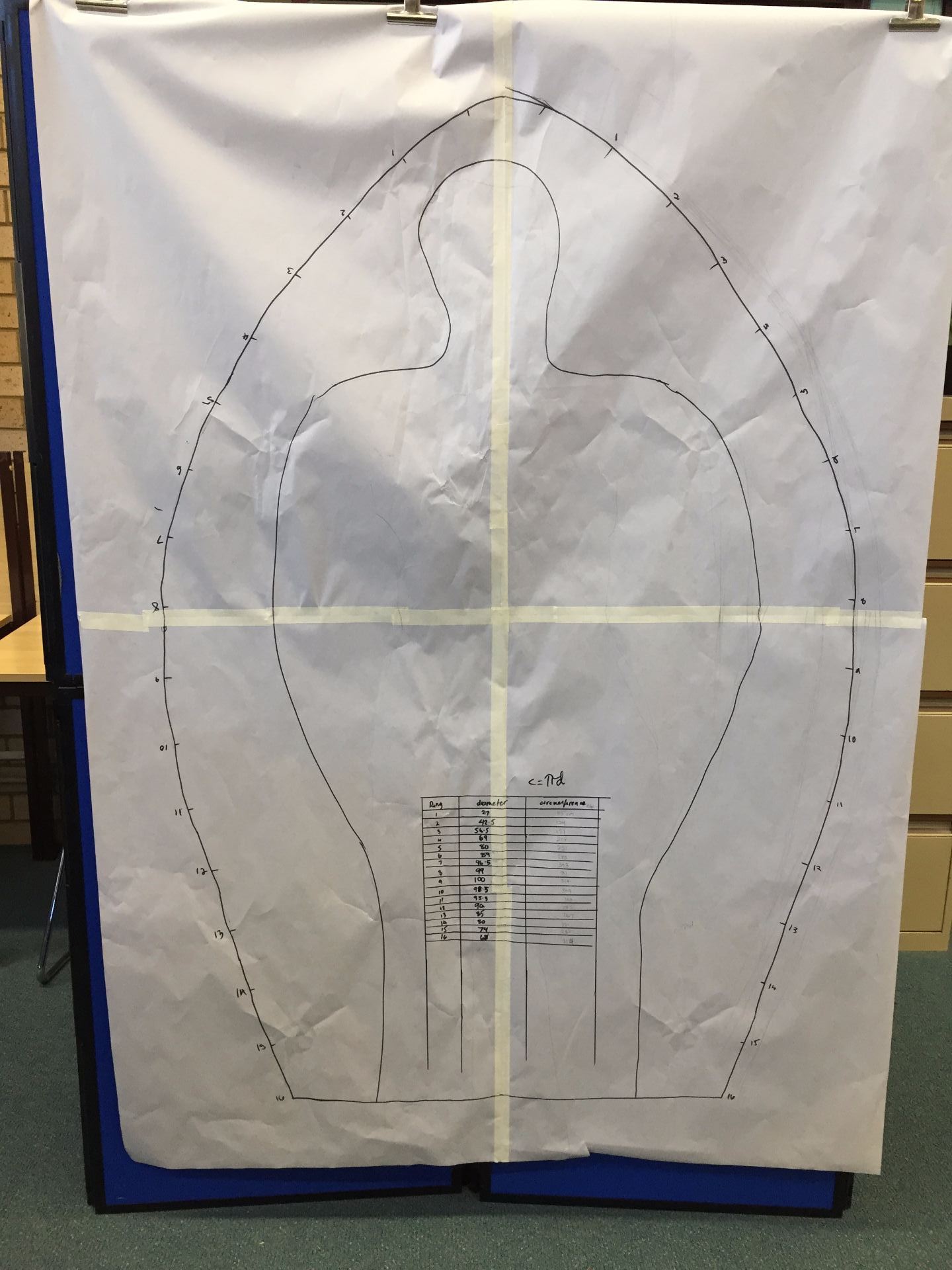
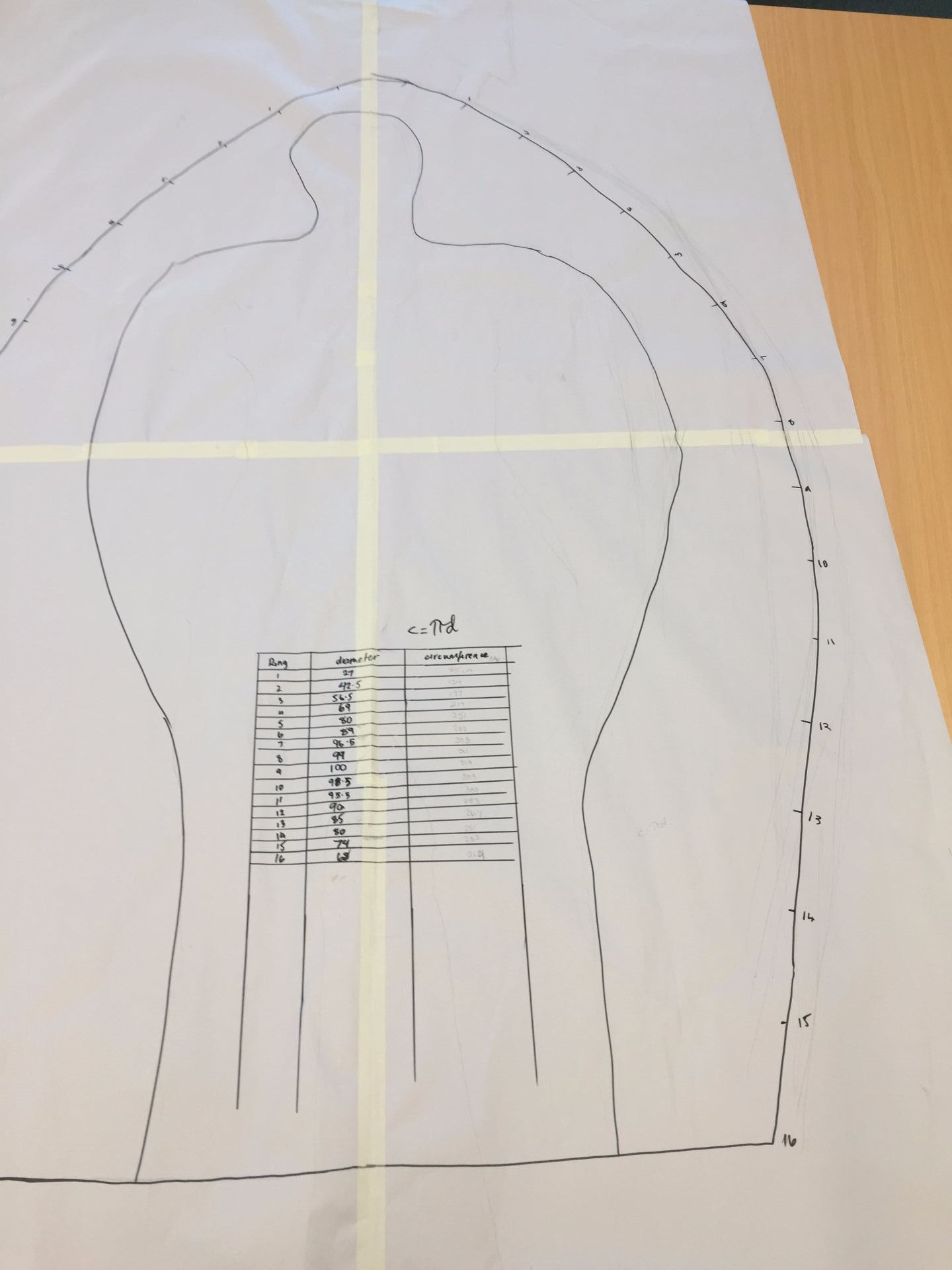
I started with a sketch using the dimensions and shapes described back in the first post for this project.

Then I started cutting all the pvc parts I needed using a tube cutter that I have had in storage for more than 10 years. It certainly made cutting the pieces less messy.

The part of the backpack that I am most proud of is that I made all the straps myself using a great tutorial I found on youtube.
 Drawing up the template onto black canvas fabric
Drawing up the template onto black canvas fabric