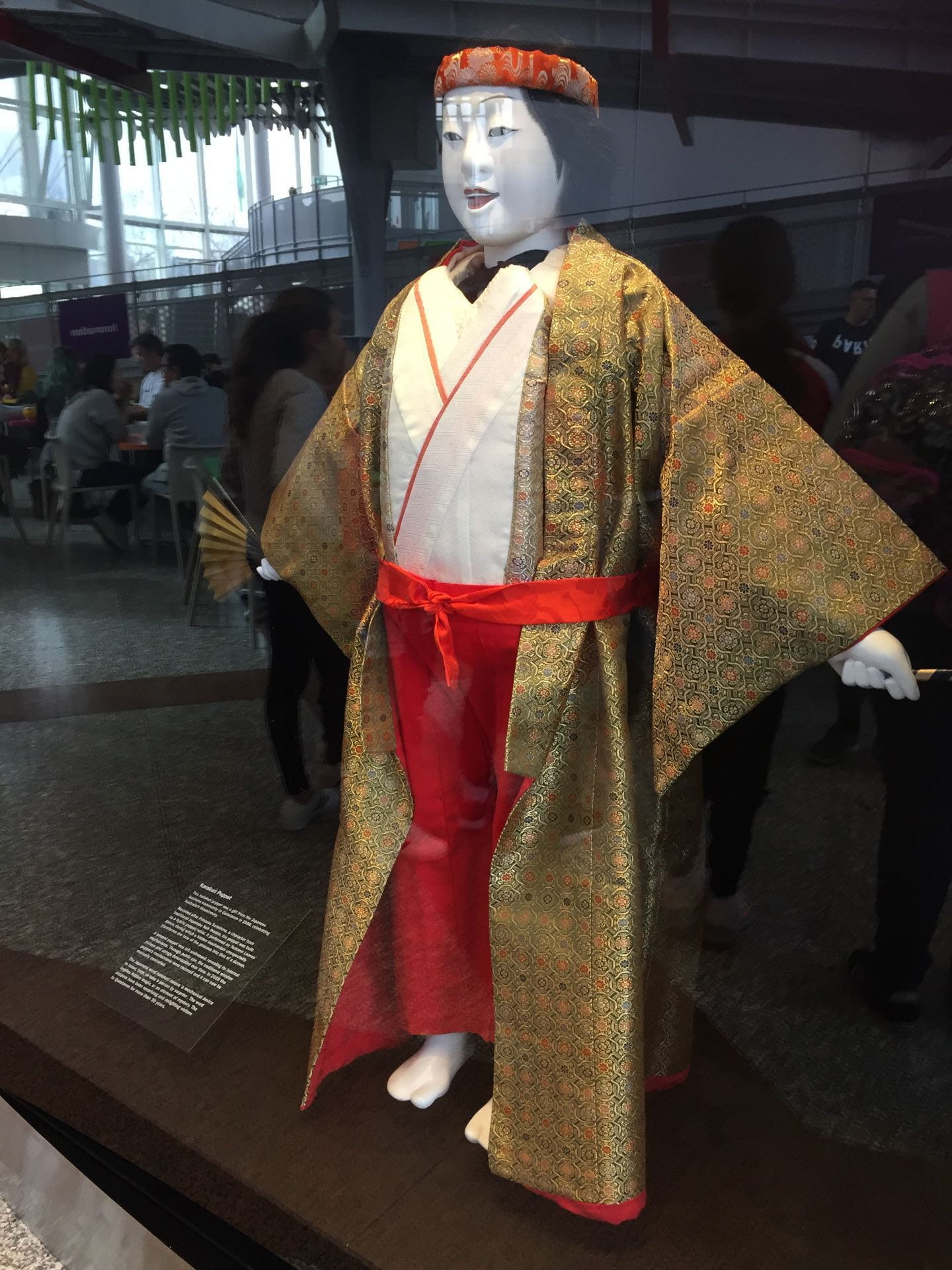
As a child, one of the puppets that I encountered, and it left a significant impression on me, was the Karakuri dolls on display in the foyer of Questacon- the National Science and Technology Centre in Canberra, Australia. The Karakuri dolls were a bicentennial gift from Japan to Australia in 1988. Two identical dolls were given- one with a full costume, and a second without the costume so that visitors to the centre could see how the doll works. I loved pressing the button and watching the uncostumed doll dance and transform into the demon character. I remember the traditional Japanese music was very hypnotising.
Since seeing the dolls perform as a child, seeing the costumed one again during my visit to Questacon in July was very nostalgic. The dolls have performed so often for visitors, that they both required extensive restoration. Sadly, the Karakuri doll on display is currently not moving, but it was wonderful to encounter a significant puppet from my childhood.

References